
PROIECTUL "EUREF-IP"



Aplicatia "EUREF-IP"
Introducere
Aplicaţia GNSS prezentata este dezvoltata în cadrul unui proiect mai larg, internaţional, denumit “Euref-IP”la care participămai multe ţări europene între care şi România, prin intermediul Facultăţii de Geodezie din cadrul Universităţii Tehnice de Construcţii Bucureşti. Coordonarea proiectului este asiguratăde către BKG Frankfurt a.M., Germania şi EUREF (Bruxelles, Belgia).
Proiectul este axat pe utilizarea sistemului GNSS-GPS în determinarea unor poziţii, navigaţie şi monitorizare pe baza principiilor de navigaţie diferenţială(D-GNSS) şi/sau cinematicăîn timp real (RTK-Real Time Kinematic). Aplicaţia dezvoltatăare ca obiectiv central îmbunătăţirea soluţiilor de navigaţie in timp real sau în mod post-procesare utilizând un singur receptor GNSS şi corecţii diferenţiale şi/sau RTK. Precizia poziţiilor determinate în navigaţie sau monitorizare se va îmbunătăţi de la circa 10…100m la 1m sau chiar mai puţin.
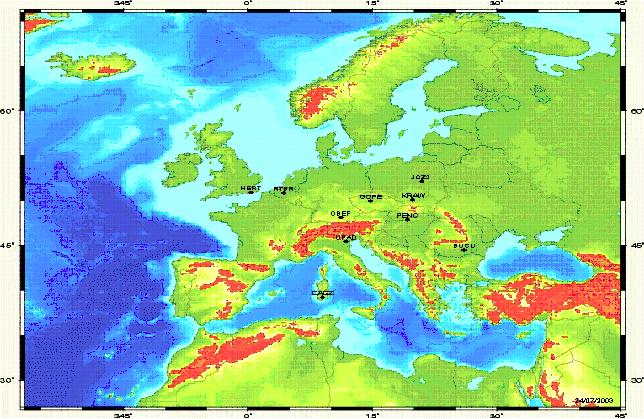
Aplicaţia este recent implementatăîn cadrul staţiei GPS permanente “Bucu”(Bucureşti) din Facultatea de Geodezie, staţie inclusăîn reţeaua EUREF-PN (European Reference Frame –Permanent Network).
Specificul aplicaţiei este dat de faptul cătransmisia corecţiilor diferenţiale sau RTK are loc prin intermediul internetului (IP-Internet Protocol), lucru care reduce mult costurile de transmisie.
Sfera de implementare a aplicaţiei este foarte largă, fiind vorba despre majoritatea sistemelor de navigaţie şi monitorizare pe baza GNSS. Deşi având la bazăîn prezent sistemele de poziţionare globalăNAVSTAR-GPS sau GLONASS, principiile de funcţionare ale aplicaţiei şi modalităţile de implementare în practicăvor fi similare şi dupădezvoltarea sistemului de poziţionare GALILEO.
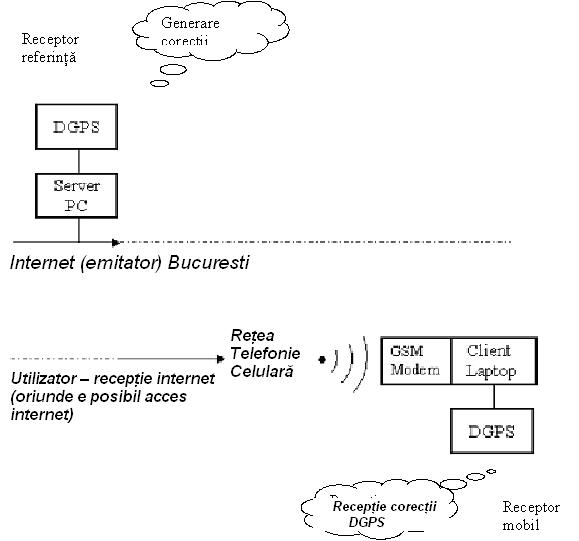
Poziţionarea absolutădiferenţialăeste o tehnicăde poziţionare prin care se determinăpoziţia unui receptor, de regulămobil (B), pe baza observaţiilor directe spre sateliţi şi a unor corecţii (diferentiale) transmise (în timp real) de la un alt receptor (A) fix, numit şi receptor-bază.
Pseudodistanţele măsurate de receptorul mobil (B) sunt corectate pe baza corecţiilor diferenţiale obţinute de la receptorul bază, iar apoi are loc o poziţionare absolută(punctuală). Aceste corecţii diferenţiale îmbunatăţesc precizia de pozitionare.
Corecţiile transmise de receptorul-bazăpot fi:
a) corecţii de pseudodistanţe (PRC-Pseudo-Range-Corrections, engl.);
b) corecţii de variaţie a pseudodistanţelor (RRC-Range Rate Corrections, engl.).
Metoda DGPS (Differential GPS) este larg aplicatăazi în special în aplicaţii negeodezice (transporturi, navigaţie, turism, ş.a.). Existăsisteme DGPS cu diverse precizii de poziţionare între care şi sisteme DGPS cu precizie de poziţionare centimetrică.
Sistemul îndeplineşte următoarele funcţii principale:
- colectarea corecţiilor diferenţiale sau/şi RTK de la unul sau mai multe receptoare GNSS (de regulă, staţii permanente);
- realizarea legăturilor de comunicaţie de la receptor la calculator şi invers;
- procesarea datelor primare = generarea corecţiilor diferenţiale şi/sau RTK, cu ajutorul sistemului de calcul;
- transmiterea corecţiilor diferenţiale generate folosind internetul (protocol TCP/IP, HTTP);
- recepţia corecţiilor diferenţiale de către receptoarele GNSS mobile folosind internetul (protocol TCP/IP, HTTP) şi alte sisteme de comunicaţie în timp real (GSM, GPRS etc.);
- administrarea datelor transmise/recepţionate la/dinspre difuzorul de servicii DGNSS şi RTK.
Principiul transmiterii corectiilor D-GNSS pe baza IP
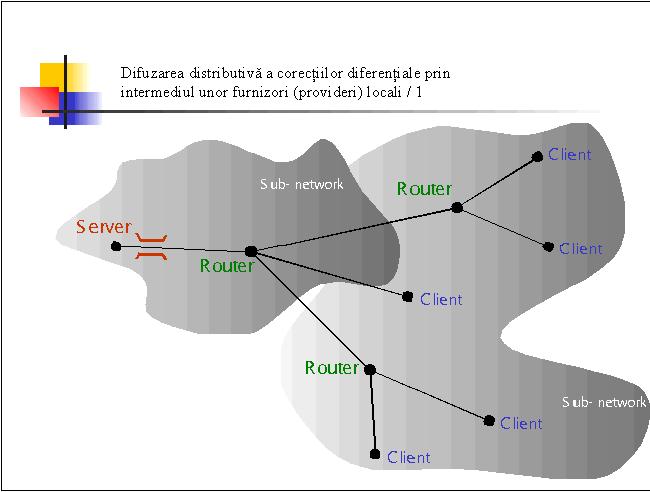
Transmiterea distributiva a corectiilor D-GNSS pe baza IP
Administrarea fluxului de date din cadrul unui serviciu de tip D-GNSS se realizeazăcu ajutorul unor programe specializate. Aceste programe vizează:
- funcţiile de generare a corecţiilor diferenţiale şi/sau RTK ( aceste programe sunt specifice receptoarelor GNSS, dar formatul de ieşire al datelor este standardizat);
- funcţiile de transfer a datelor de la receptorul GNSS la sistemul de calcul (în general nu depind de tipul receptorului satelitar);
- funcţiile de verificare, validare, arhivare a datelor;
- funcţiile de difuzare a corecţiilor diferenţiale în mod direct (spre utilizatori) sau indirect (prin intermediul unui serviciu specializat);
- funcţii de monitorizare a datelor transmise, eventual a utilizatorilor serviciului D-GNSS (RTK).
In cadrul proiectului European EUREF-IP s-a dezvoltat un pachet de programe denumit Ntrip (Networked Transport of RTCM via Internet Protocol), care realizeazătotalitatea funcţiilor necesare prezentate mai sus.
- Pachetul de programe Ntrip
Ntrip include un protocol de sine stătător bazat pe HTTP –Hypertext Transfer Protocol şi adaptat la cerinţele de transfer al datelor GNSS. El permite difuzarea corecţiilor diferenţiale (în format RTCM-104) sau al altor tipuri de date GNSS, spre utilizatori staţionari sau în mişcare, prin intermediul internetului. Ntrip permite accesul internet prin reţele mobile bazate pe IP, cum sunt reţelele GSM, GPRS, EDGE sau UMTS.
Caracteristici principale:
- Este bazat pe protocolul foarte popular HTTP find uşor de implementat de diferite platforme ale unui utilizator;
- Nu este destinat unui număr limitat de formate fiind utilizabil la distribuţia oricărui tip de date GNSS;
- Poate servi la utilizarea în masăa serviciului D-GNSS prin diseminarea simultanăa sute de tipuri de date spre mii de utilizatori;
- Nu este neapărat necesar ca difuzorii de date GNSS şi utilizatorii săintre în contact direct (pe internet), astfel încât este protejatăreţeaua localăa difuzorilor;
- Permite transferul datelor pe orice tip de reţea mobilădatorităutilizării protocolului TCP/IP (conversie SERIAL>TCP/IP, care poate fi reconvertit TCP/IP>SERIAL la utilizator).
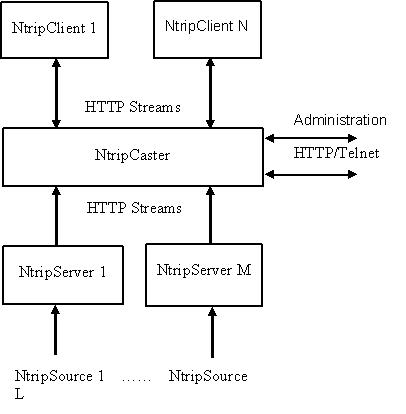
- Pachetul include 3 module principale: NtripClient, NtripServer şi NtripCaster.
NtripServer –realizeazătransferul fluxului de date spre o locaţie precizată;
NtripCaster –componenta principalăa sistemului de programe, realizând colectarea datelor diferenţiale, validarea acestora, monitorizarea fluxului de date, securitatea accesului, diseminarea datelor;
NtripClient –permite accesarea datelor difuzate de NtripCaster de către utilizatori.
Protocolul TCP/IP utilizat în modulele Ntrip permite detectarea automatăa pierderii legăturii între componentele sistemului (modulele softului) şi reconectarea automatăla dispariţia acestei întreruperi.
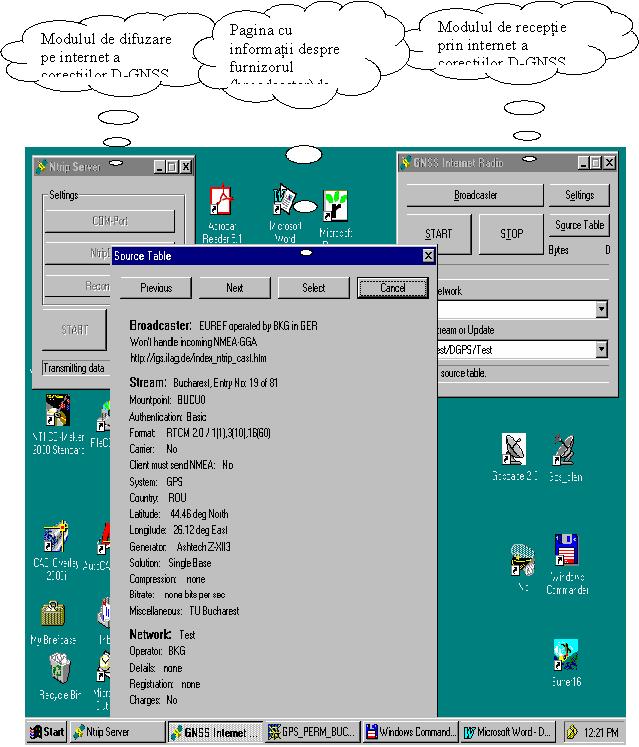
In figura de mai jos este prezentatăstructura de principiu a sistemului de programe Ntrip.
Proiectul “EUREF-IP”demarat în anul 2003 include serviciul de date diferenţiale din cadrul Facultăţii de Geodezie Bucureşti –Staţia GPS permanentă“Bucu”. Staţia permanentădispune în prezent de toate echipamentele necesare funcţionării acestui serviciu. Pe baza acestora şi a modulelor software disponibile s-au realizat primele testări. Ele au vizat:
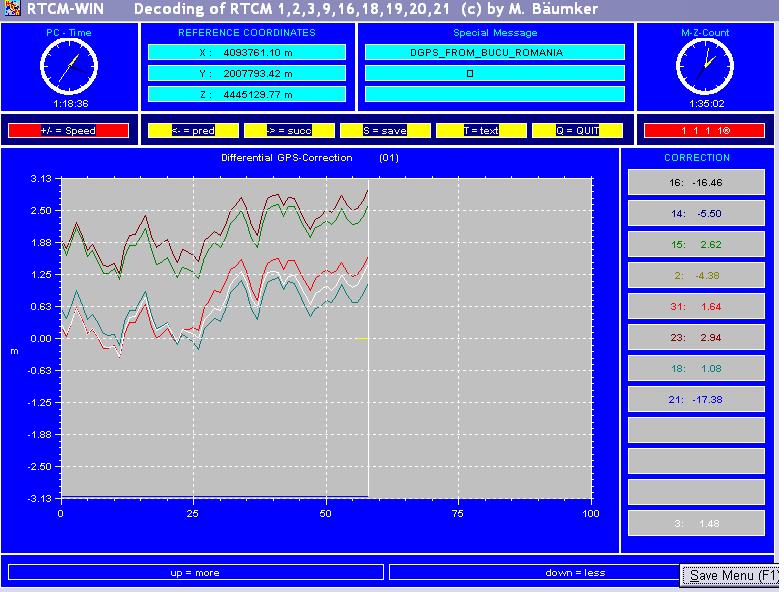
- generarea corecţiilor D-GPS în format RTCM;
- transmiterea corecţiilor D-GPS prin intermediul internetului;
- recepţia corecţiilor D-GPS prin intermediul internetului;
- monitorizarea funcţionării serviciului de distribuţie a corecţiilor D-GPS (în prezent prin intermediul BKG-Frankfurt a.M. şi Euref);
- posibilităţile de creare a unui serviciu naţional de tip D-GNSS în România;
- posibilităţile de utilizare ale serviciului D-GNSS în diverse aplicaţii (va fi experimentat pe deplin dupăce se va dispune de echipamentele necesare unui utilizator al serviciului).



Exemple de difuzare / recepţie a corecţiilor diferenţiale (format RTCM) de la staţia D-GNSS in Facultatea de Geodezie Bucureşti